|
仓储物流行业是人工智能应用最广的领域之一。研究机构Tractica预测,2021年全球仓储和物流机器人出货量将从2016年的4万台激增至62万部,市场收入从2016年的19亿美元增长至224亿美元。 中国在智慧物流领域发展迅速,整体的未来发展空间广阔。与发达国家相比,单位GDP中我国的仓储成本占比是发达国家的2-3倍之高,对仓储业进行成本控制是一个长期目标。在此背景下,拥有专业化(special)、机动灵活(smart)、轻便小巧(small)3S的特点的轻物流开始受到追捧,国内柔性轻物流需求逐渐爆发。 机器人大家说第25期,我们请来了柔性轻物流领域的顶级技术专家、布科思联合创始人/CTO浦剑涛为大家做分享。浦剑涛是中科院自动化研究所模式识别与智能系统博士;模式识别和人工智能系统领域专家;曾于中科院自动化研究所模式识别国家重点实验室和高技术创新中心工作10年;现为布科思公司首席科学家,主持机器人算法等核心技术引擎的研究和开发工作。
浦剑涛博士说,柔性轻物流制造千亿市场这个题目很大,但本质是运用智能物联的技术和智能搬运的技术,来改造当下的轻物流,解决我们轻物流当中的问题。接下来请看第25期机器人大家说的演讲干货:
我这次分享的内容分了七个部分。第一部分讲物联,讲物联的这个概念是什么?了解我是谁?我在哪?也就是说这个物体在什么地方。然后介绍一下搬运,如何把物体或者货物搬到我们要去的地方,这样我们就解决了两个很重要的问题,东西在哪、怎么搬走。第三要介绍一下柔性轻物流的行业背景。什么是轻物流,什么是重物流?物流的一些解决方案与关键技术,我们会简要分析一下它优缺点;在第五部分,我介绍一下布科思的解决方案,以及布科思针对这方面的应用和问题所推出的一些产品;第六部分,与家一起分享布科思目前产品在行业当中的应用;接下来我们要介绍一下目前的轻物流。 物联:我是谁?我在哪? 物的概念是一个办法的概念,它包括了这个世界上一切的物理存在,当然也包括人在内。我是谁,意思是我们要对所有的物体,都要给它一个身份的标志,这个身份的标志有很多种方式,比方说有条形码,二维码。二维码的技术,机器人技术以及大数据技术,它们无一例外地要用到网络,要用到人工智能。它是物联网的一小部分,今天我们不谈网络层,我们谈感知层,而且只谈感知层当中的一小部分,物体与它位置的一个观念。
搬运:我要去哪?怎么去? 所谓搬运,就是我要去哪,这是去哪。我要去哪是有系统,就是说仓储管理系统,或者运输管理系统来告诉搬运系统,我的目的地在哪里,我需要经过哪些地方,我要去哪里。第二,我们的自主搬运的系统必须能够自己想办法,自己定位,自己规划路径,自主避障,自主提供他相应的目的地去,这是我们搬运系统要解决的一个问题。
我要去哪,需要地图和路线信息,这样我们的系统能够利用这些信息来规划出相应的路径来,能够定位自己在地图当中所在的位置。怎么去?需要我们的系统不光具有全局的实时路径规划,也能够进行局部的按时的具体路径规划途径,在遇到障碍物的时候,才能够自动的选择避障,绕过它,这种避障和不避障实际上是有客户和科学路线来选择的,比方说在宽阔的地方,一些货物不是很重,我们可以选择让它避障,但在某些场合道路狭窄,或者货物非常重,非常危险,我们可以选择不让它避障,这个我们可以根据在软件单进行一个定制。 智能物联与搬运系统的应用前景——让工作傻瓜化 首先轻物流它不仅仅是在物流行业当中,仓储物流行业,在先进制造,在新零售,很多很多这样的行业当中都在应用。 首先看一下智能化,我们叫智能物联与搬运,我们为什么要智能化?因为智能化能够解决用户面临的问题,能够满足他的需求,我们先对智能化的概念做一个泛化的解释,首先我们看自动化是什么,自动化的目的是让我工作更快更高更强。为什么这么说呢?采用自动化技术,最最重要的目的是在于机器人或者机器本身他可以做得比人更好,这是自动化根本目的。就因为机器可以比人做得好。智能化的目的很简单,就是让机器人能够更智能的工作,从而让我们的工作更傻瓜化。用一句更通俗的语言来表达,让工作通过智能化的改造,使得傻瓜都可以来干。 我们对轻物流进行智能化改造,说到底我们就是为了来提高它的自动化程度,是让机器比人做的工作会更好,另外一个我们希望这个工作不依赖于熟练工,使得人可以更简单,不管什么样的人能够更好地把工作做好,使得仓库物流不再挑选人。再一个就是通过智能化改造,使得仓储物流人员越来越少,甚至说完全无人化。无人化的真正的目的在于让机器去代替人,从而把人解放出来去做更有意义的,更有创新性的事情。 智能化技术对轻物流的柔性化改造 利用智能化技术对轻物流做一个柔性化的改造,涉及到一个柔性化的问题,仓储轻物流它在一个完整环节,我们一般有清点、入库、上架、下架、搬运、移库、盘库、分捡、出库等等,还有打包,但是在仓储轻物流里面最主要的机构环节都写在这里,里面最最重点的我们可以说是分捡,在我们最接触的客户当中反映的问题最多的。 轻物流这个应用场景的特点,就是货物一般比较轻,而且体积相对来说比较小,在仓库当中货架的仓位里头往往会出现货物混装的现象,因为它的货物比较小,然后所以它很难,比如有一个仓位,它可能比较大,相应的货物又比较杂,比较小,一个仓位它可能放不同种类的货物,另外一个轻物流的客户,他们希望货架和仓库的改造成本要低,然后轻物流的仓储,因为相对的工作内容是比较单一的,所以人员设置和流动性比较大。 单一性和人员素质这一块,因为在轻物流行业里头,因为工作内容往往比较是拿拿货,不是很复杂,所以很多客户为了节省成本会请一些老年人来做这样的事情,这些年轻人来做呢,他们一般会流动性非常大,做了很短时间就走了,但是仓储物流,这里头风险是希望熟练工能干的。这一块对人员素质提出了很高的要求。 轻物流的柔性化体现在哪里? 轻物流的柔性化体现在哪里,首先在改造的柔性化,也就是说轻物流的改造可以希望少一些硬件的改造,多一些软件的改造,我们不希望对货架货物做过多的改造,特别是从信息化的改造,然后存在货物的混装现象,我们希望货物的混装是允许的,也就是说在物理上我们允许混乱,但是在后台的逻辑和数据上我们希望它是整洁的。 通过后台的数据的整洁性,引起物理上的混乱,但是又不影响分捡工作的效率,这是我们希望通过流行化改造达到的一个目的。再一个通过流行化的改造,我们不再需要熟练工,对工作人员的素质要降低要求,也就是说我们新手也能高效地工作,这个在很多场合都会出现这样的问题,包括我们这些重点客户的一些调研,他们经常会希望说我们清走,更简单高效的工作,很多仓储,即便熟练的工种进去,也会出现出错,我们希望通过这种方式降低出错的概率。 接下来我们看一下目前市场上主流的一些轻物流的解决方案与关键技术,首先我们的轻物流它是离不开上面的系统软件的,也就是仓储管理系统,物流执行系统以及运输管理系统,那么我们所有的方案都是需要在这三大系统的管理之下来进行运行。
那么在执行层上我们列举三个典型的系统,三个典型的方案: 一、电子标签的分捡系统:更明确地讲应该叫电子显示标签分捡系统,这种系统它的运作模式主要有两种:一种叫摘果式,还有一种叫播种式。 所谓摘果式就是系统根据订单自动把仓位上面的分捡了,有分捡人员拿到单去寻找货物,在货架上相应的仓位拿相应的货物,就类似摘果子一样。 所谓播种式它指的是我们的框是放在一个地方,不同的分捡人员他们分管一个区域,每个框当中需要什么,会显示在它的终端当中,它根据需要的,每个框需要的数量从而把他分捡区域的货物拿过来放到这个框里头,这种方式我们称之为播种式。 电子标签分捡系统的工作并发性是比较差的,因为一个订单下来之后它不能多个订单同时进行,另外一个电子标签需要对整个的仓库做这种信息化改造,所以它的部署也比较复杂,成本相对比较高。另外有一些场合,特别像服装等等这些行业,它们对电是非常敏感的,特别害怕火灾,所以它对应用场合非常受限。 二、感知货架:感知货架是基于RFID技术的,也就是说在货物上面,我们每个货物都会给它贴上RFID的标签,我们在人的身上也会带上RFID的标签,货架上面我们会装上RFID的读卡器,这样我们就可以实现所有的货物上了架之后,每个货架就能感知到它的哪个仓位上放了哪个物品,而人身上佩戴了RFID之后,他走到任何一个具有感知能力的货架旁,从而实现了对人员的定位。 三、立体仓库:在这个里面自动化的货架,有传送带,还有条形码或者二维码的读卡器,通过它们综合的解决,综合起来,仓储里面还包括很多AGV,包括扫码机,自动打标机,二维码打印扫描机,打印机这些,整体组成了一个立体仓库,它的优点自动化和无人化的程度最高。现在大家可能知道像菜鸟网络的一些仓库,都是立体仓库的一个典型,但是这样的仓库部署成本高,只有新建的才会用。 布科思的解决方案与产品介绍
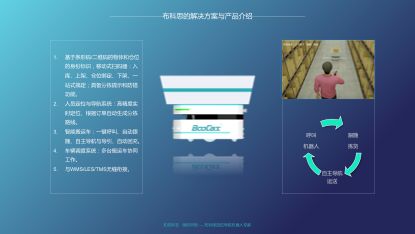
布科思的方案在物体的标识以及位置的(定位)这一块采用条形码二维码,因为条形码和二维码往往是商品上自带的,我们不需要对商品进行改造,唯一需要改造的地方就是在仓位上贴上条形码或者二维码,这是非常简单的工作,大多数应用场合都可以做,而且成本不高。 贴好码之后利用移动式的扫码器,把物体跟仓位进行管理,在上架的时候就可以把仓位扫下来,把相应物品的二维码给扫下来,从而使得上架、入库、货物与仓位的绑定、下架等等这些工作,这一站式就可以搞定。在手机终端它不仅仅有扫码的功能,同时也具有分捡提示的功能以及防错的功能。假如说你拿的物品与订单当中的二维码是不一致的,或者说物品的类型是不一致的,那么终端会进行报错,因为它的这种防错几乎可以做到无错。 人员的定位是通过高精度的无线实时定位系统来实现的,通过这种方式我们可以随时追踪每个分捡人员的位置,然后我们可以根据订单自动生成一个分捡路线,省得分捡人员走上冤枉路。每一个人员他根据订单所生成的分捡路线是不一样的,所以他允许多个分捡人员同时实现多个订单的分捡,可以很好解决这种并发性的问题。 在搬运这一块我们是通过智能搬运车来实现,它可以实现一键呼叫,自动跟随,可以解放我的双手去搬货拿货,然后货拿完之后我们的小推车可以自动地把这个货物送到他的目的地去,出库,搬到库房外面。智能小推车也是具有一个自动的回充功能,它没有电了,可以自动去回冲。它具有自动导位,当我们在分捡的时候,我们并不知道这个分捡路线是怎么样,那么我们可以跟着智能搬运车走,它带着我去拿我需要的货物,这个功能也是在很多地方非常实用。 布科思本身还有一套技术研发的一套车辆调度系统,它可以允许多台搬运车协同工作,可以在后台获取你相应的地图,你的路线,以及你的各个点,把它定义,功能定义,位置定义,以及实现任务的自动标注,车辆的自动标注。最后我们的整个系统与物流管理系统,仓储管理,车辆调度管理以及运输管理,整个都是可以无缝的进行衔接。 接下来说电子标签的摘果式和播种式,布科思的方案怎么实现的。摘果式:订单来了之后,系统会根据订单自动生成一个分捡路线,那么我们的分捡人员根据分捡路线自动导航到相应的仓位取货物,在取货物的时候我们终端上面会提示你要取哪个仓位的,什么样的货物,拿下来之后分捡人员需要用扫描枪扫描一下。在分捡人员拿货物的时候,小推车随时跟在你的后面,把货物拿完之后可以放到小推车里面,然后继续导航到下一个位置去拿相应的货物。拿完之后我们在小推车的屏幕上面按一下完成键,它自己就会根据订单的信息导航到,自己把货物运输到它的目的地去,这是一种摘果式。 还有一种摘果式的实现方法是,系统根据订单自动生成一个路线,然后派出智能搬运车,分捡人员可以跟着智能搬运车。智能搬运车每到一个相应的仓位就会停下来,利用屏幕提示用户,分捡人员需要哪些仓位上的哪个货物,分捡人员拿下来放到车里面,然后按键之后车就会自动往前走,这样一直到把所有的货物都拿完,这是另外一种摘果式的实现方法。播种式我们可以通过我们小推车拿到多个订单,多个订单会分发给不同的小推车,分捡人员他是分管一个区域的,小推车到这个位置之后,它会显示他上面所需要哪些货物的名称,这个型号,分捡人员从货架上拿出来放到小推车上,小推车又会进入到下一个区域去拿下一批货物,我们称之为播种式方法。 千亿赛道 布科思的产品方案制胜之道 根据2016年底我国关于仓储的营业性面积的统计,大概有9.98亿,但实际上真正的完全无人的自动化的仓储不到10%,这里头剩下的90%可能就是轻物流,轻物流的市场前景是非常大的,赛道非常宽。 接下来我介绍一下我们布科思的一些产品,首先来看我们看到这个图,第一个我们BooStar产品是一个小型化的定位产品,比方说在一片区域当中你可以在小于十个定位标签的情况下,可以对人员进行定位,部署成本非常低。第二个产品我们是定位跟踪雷达,这个雷达是可以360度覆盖的,它输出的是一个配比和方向,相当于是一个基坐标,这样的话你的系统知道你的基坐标之后可以随时跟踪你。
第三个产品是我们的移动底盘,我们自主开发的双轮插座的底盘,也是一个低成本的,可以具有自动避障,自动导航,自动充电,自动建图这样的功能,目前我们也是服务机器人的方案提供商。这一块是我们的核心产品,叫Navi++消费级定位导航系统和Navi++Pro工业级定位导航系统,这两套系统也是作为我们消费服务机器人定位导航和工业机器人定位导航的一个方案提供商,这是我们两个主要的方案。 第三个是我们的BooStar-X大规模人员物资定位系统,这个定位系统在轻物流,在重物流,以及对人员定位有非常(准),有大量的人员定位的要求情况下都可以使用,它具有精度高,功耗低的特点,目前在上海浦东机场已经在使用我们的这套系统。
布科思能做什么?布科思的产品有室内定位系统,还有机器人的定位导航方案,有叉车的无人驾驶方案,也包括AGV的无人驾驶方案。我们作为方案提供商来讲,我们一部分客户是集成商客户,包括民用级的,工业级的,另外我们也为轻物流的客户提供完整的系统的,包括他产品的硬件智能系统的解决方案。 我们的客户包括集成商客户,服务体系的集成商客户,APP的集成商客户,也包括仓储,有仓储这样的企业,他们也是我们的客户。 在使用场景方面,在服务机器人有商场、银行、医院民用场景,在工业场景当中像AGV的叉车,无人搬运车,还有一些工厂,商场大型的人员物资的定位,这是工业上的应用场景。除此以外在军队里面也有很多的应用,还有水电站等等都会有相应的应用,众多复杂的场景,我们的方案是经过了考验。 浦剑涛博士的三个思考 我想跟大家一起来分享和思考的问题,第一个就是Slam的未来是单极的机器视觉还是多极的多传感器融合。这个问题的意思就是现在我们大家都知道视觉时代可以引导Slam的未来,大量的资本会进入到这个领域当中去,机器视觉也是我们人工智能很重要的一个研究领域之一。我们可能从未来来讲,机器视觉是很重要的,这个课程是最最重要的,那么Slam的未来仅仅是机器视觉还是多传感器融合才能实现呢?从Slam技术本身来讲有一点是很明确的,未来一定是(羽翼级)Slam的领域,不管是机器视觉也好还是多传感器的融合,要实现一个垄断的精准的,更有实用意义的这样一个Slam技术,羽翼级的Slam无疑是未来,这一点是我想在技术发展方面跟大家一起交流讨论。 第二个问题就是中小型科技企业,高科技企业,如何在大企业的商业生态中谋求发展?现在很多大企业在研发AI,人工智能大脑,发展这样的计算平台,特别是最近百度发布了他的人工智能的服务端的AI芯片以及发布了他的AI的平台。中小型的高科技企业,在大企业这种商业生态中我们是选择竞争还是选择合作,如何谋求自身企业的发展? 第三个问题是如何让我们国家的科技真正地硬起来。我们知道现在中国模式创新是很厉害的,平台创新也是很厉害的,但是在我们从事机器人这个行业里头,我们做机器人的很多同仁都有很深切的感受,我们的芯片,哪怕只是一个电容电组,我们国产的质量,稳定性都是非常堪忧的,我们用的芯片大多数都是使用国外的,我们的电机,我们的减速器,跟日本和德国的电机和减速器,确实有相当大的差距,我们国产的激光雷达虽然便宜,但是稳定性跟国外的都是有很大的差距。我们中国的科技企业要想真正能够硬起来,需要我们的科技真正硬起来。一方面我们要在我们的硬件这一块提高我们中国的工业制造业的硬实力,另一方面智能学习给人工智能带来了爆发式的增长,但是在基本的算法研究这一块,我们不能仅仅偏走向计算平台的路,而要把大量的研究力量和路径去研究深度学习以及人脑真正的工作机理。 用户提问 提问:见过很多厂家的AGV,今天系统的学习了它的运行机理。我不懂这么复杂的技术,但做动力电池见过几个公司的AGV车和系统。我但从普通消费者的角度出发考虑一个现在最头疼的问题,停车难问题。能不能开发一种特种的AGV型机器人结合你们这种软件系统,在每个小区都配备一套停车整理系统。 浦剑涛:轻物流和重物流的对比,我可以用高速无人驾驶和低速无人驾驶的对比来说明:高速无人驾驶的车辆行驶在高速路上,速度快,但环境结构化好;低速无人驾驶行驶在街道和普通道路,看似速度慢,但环境远比高速无人驾驶复杂,所以,低速无人驾驶的技术复杂度实际比高速无人驾驶要高的。类似的,轻物流的低成本改造和复杂的运行环境和流程,其技术难度在很多方面比整体的自动化仓库更复杂。 END |

- 关注天气: